PPP由单一系统走向多频多模融合,成为实现快速广域精密定位的关键路径之一,有效提升了PPP的收敛速度、定位精度与可靠性。
由于不同GNSS系统之间存在时间基准和接收机硬件延迟等差异,多模PPP融合模型通常估计各个GNSS系统的接收机钟差或者引入系统间偏差(ISB),常用的ISB建模策略包括白噪声模型、随机游走模型、分段常数模型,其理应与卫星精密钟差估计模型策略保持一致。
同一GNSS系统不同频率之间的硬件延迟存在差异,称为频间偏差(IFB)。融合BDS/GPS/Galileo多频观测值时,在对应的多频伪距观测方程中引入IFB参数。
引入GLONASS多频观测值,意味着同时引入了大量的IFB参数,为多频多模PPP模型及后续模糊度固定带来了严峻的挑战。同时,
多频卫星相位硬件延迟的时变部分无法被基准频率的钟差和电离层等参数完全吸收,导致不同频率的无电离层组合估计的卫星钟差并不相同,两者之间的差异称为频间钟偏差(IFCB),严重影响多频PPP定位精度。相比较于多系统融合,
多频PPP浮点解并未展现出明显的增益效果,仅仅当双频卫星数较少时才略有提升,然而频率分布却能够有效提升模糊度固定性能,显著缩短PPP固定解收敛时间。
当前,多频多模PPP浮点解模型已经较为成熟,然而其定位性能及其可靠性仍然难以满足快速广域精密定位需求,
模糊度整数特性约束能够显著提高定位精度及其可靠性,使得PPP模糊度固定成为实现快速广域高精度定位的核心技术之一。
相位偏差改正是实现PPP模糊度可靠固定的前提,早期的相位偏差估计模型通常基于双频无电离层组合。随着GNSS信号频率增加,提供多频组合形式相位偏差产品难以有效适应多模多频GNSS发展需求。IGS工作组提出了面向原始观测值的观测信号偏差(OSB),PPP用户端只需将各频OSB改正到对应原始观测值,即可恢复模糊度整周特性。目前,大多数IGS分析中心仅支持双频基准频率模糊度固定,如表2所示。
当PPP用户修正相位OSB时,此时的PPP浮点模糊度仅包含接收机端的相位硬件延迟,通过选取模糊度基准或者基准卫星,即可恢复模糊度的整周特性。相较于设置固定组合的超宽巷、宽巷组合,LAMBDA去相关构建的模糊度组合能够最大限度地顾及模糊度之间的相关性,因此,
基于原始各频率模糊度的LAMBDA算法能够固定数量更多的候选整周模糊度,但是其依然存在固定错误的风险
由于GLONASS采用FDMA信号体制,其模糊度固定面临独特挑战,特别是多频GLONASS涉及CDMA/FDMA信号混合。
目前,尚无分析中心提供GLONASS模糊度固定产品,仅能通过多系统融合GLONASS浮点解间接提升PPP性能
为了充分发挥PPP和RTK技术的各自优势,克服2种技术的缺陷,PPP−RTK技术应用而生,其核心是对流层和电离层信息的精确建模,PPP用户接收状态域空间表示(SSR)的大气增强信息,即可实现快速甚至瞬时模糊度固定。
一是通过双频或多频观测值构建无电离层组合以消除一阶电离层延迟,该组合无法利用电离层延迟的空间相关性;
电离层延迟的有效建模与改正对PPP−RTK模糊度快速固定的影响更为显著,已成为PPP重要研究方向
提取电离层的常用方法包括载波平滑伪距和非组合PPP。根据提取的电离层信息,通常采用3种建模方法。一是数学函数拟合,二是空间插值模型,三是机器学习方法。其中,
基于空间插值模型的斜电离层精度通常达到数个厘米,然而其对数据播发的采样率、带宽和数据传输量等要求更高;
基于数据驱动的机器学习方法能够捕捉电离层空间分布的复杂特征,然而面临训练样本大小和模型特征选择等难题。
高质量的电离层改正信息是实现PPP−RTK模糊度瞬时固定的核心要素之一。由于电离层投影函数显著降低了电离层精度,厘米级精度的斜电离层延迟的提取正成为研究热点。
随着参考网规模的扩大,PPP−RTK的模糊度首次固定时间也相应延长。同时,如何设置虚拟电离层观测值权重尤为重要,逐步松弛约束、时空约束通常优于常数约束,研究更精细化的电离层不确定度表征方法对PPP−RTK性能提升具有重要作用。
ZTD分为可建模的干延迟和难以建模的湿延迟:前者采用经验模型修正,后者通常设置为随机游走模型予以估计。为了削弱ZTD与测站高程方向位置等参数的相关性,在PPP模型中引入高精度外部ZTD产品进行改正或约束,从而提升PPP定位性能。
对流层增强的核心在于构建高精度、区域适用的ZTD建模策略,并通过区域模型对用户站进行大气延迟校正。对流层建模方式主要包括3类。一是空间插值模型,二是气象辅助建模法,三是机器学习方法。
在增强PPP定位性能方面,区域对流层建模及其改正策略已取得显著成效,ZTD改正PPP和ZTD约束PPP 2种增强模型均可有效缩短PPP的收敛时间,特别是测站高程方向。
国际低轨星座发展正由通信主导逐步向通信与导航融合转型,为构建面向未来的PNT冗余体系和快速PPP增强奠定基long8平台用户评价础。
与中高轨GNSS卫星相比,LEO卫星几何构型变化快、可视卫星变换频繁、非保守力模型复杂,其定轨方法主要包括卫星激光测距、星间链路及基于GNSS观测值定轨等。LEO采用高性能晶振代替原子钟作为星上基准频率源,频率稳定性显著差于GNSS卫星原子钟,严重限制其高精度中长期钟差预报,为满足高精度定位需求,钟差预报时长不宜超过数十分钟。
近年来,利用LEO卫星增强广域快速PPP已成为高精度定位研究的热点之一。仿真结果表明,LEO星座在提升定位精度与加快收敛速度方面显著优于中高轨GNSS系统。在模糊度固定方面,LEO星座亦展现出强大潜力,低轨增强可显著提高模糊度固定成功率并缩短其首次固定时间,固定解的稳定性和精度均优于浮点解。总体而言,
在不依赖区域密集地面参考站增强的条件下,基于低轨星座增强GNSS,有望大幅度解决PPP初始化时间长的难题。
随着无人驾驶、智慧农业、低空经济等新兴领域对高精度定位需求的持续提升,商业PPP服务逐步走向成熟。典型的PPP商业服务提供商包括中国的千寻位置、华测导航、美国Trimble以及瑞典Hexagon等,典型技术特征见表3。
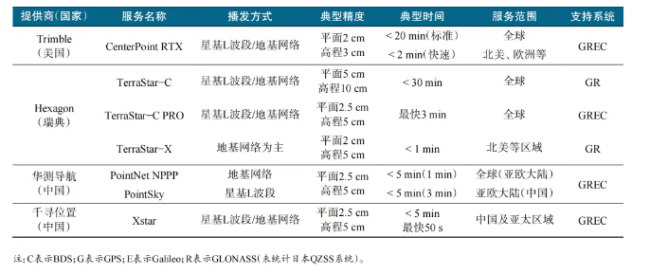
PPP星基服务通过GNSS卫星链路实时播发卫星轨道、钟差及信号偏差等增强信息,支持用户终端在无地面通信网络条件下,仅凭单台接收机实现分米至厘米级的广域高精度定位。
该类服务消除了传统PPP对地面基准站网络的依赖,显著扩展了GNSS广域精密定位应用的适用场景。
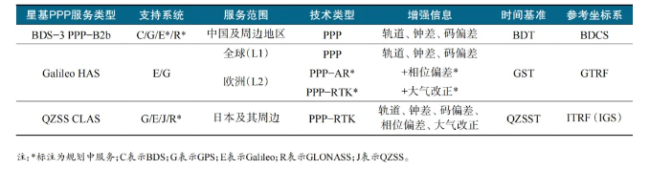
中国BDS−3自2020年起在亚太地区提供PPP−B2b星基服务,能够在动态环境中为用户提供分米级至厘米级的高精度定位服务。欧洲Galileo于2023年1月24日正式启动高精度服务(HAS)的初始运营阶段,构建了覆盖全球的分米级增强体系。日本的准天顶卫星系统(QZSS)于2018年11月1日正式运行厘米级增强服务(CLAS)。3类星基PPP服务的核心播发参数与服务性能对比见表4。
PPP高度依赖高质量、高可靠性的误差建模与改正产品,当前,国际主流的精密产品服务体系仍在持续完善,缺乏耦合的GLONASS钟差、伪距/相位OSB产品,并未完全发挥全系统全频点PPP潜力。
LEO卫星与GNSS融合开展PPP增强虽具显著潜力,但因二者在轨道高度、动态特性、时间系统、信号调制等方面存在显著差异,诸多难题亟待实测数据验证。同时,GLONASS系统未来一段时间内仍维持CDMA/FDMA信号混合。
快速PPP技术依赖于连续、稳定的GNSS观测数据和实时高精度改正信息的持续获取,然而,在城市峡谷、高架桥下、林地等复杂环境中,GNSS信号易受遮挡、多路径干扰严重,严重影响PPP模型初始化与模糊度固定,降低服务稳定性与可用性。
借助LEO卫星大规模部署,加快面向全系统PPP−RTK和LEO融合解算的观测模型、误差建模及产品生成与表达的研究,解决异构轨道、时空基准、信号体制差异带来的融合瓶颈。
融合GNSS、LEO卫星、惯性导航、视觉导航、声光电磁等多源数据,构建具有环境感知、自适应建模与鲁棒解算能力的融合增强定位体系,推动“导航−感知−通信”一体化协同技术发展及核心装备集成。
推进星基PPP服务标准化、通用化与广域互操作,扩展星基PPP播发改正数类型,面向灾害应急、通信薄弱和信号遮挡等重点区域,发展星基PPP与地基/LEO增强互补融合机制,构建自主、安全、泛在的精密定位服务体系。

业务咨询

扫码,关注我们




